/sigh
So I redesigned the robot again. and I failed… /sigh
Here’s a quick picture of the CAD model: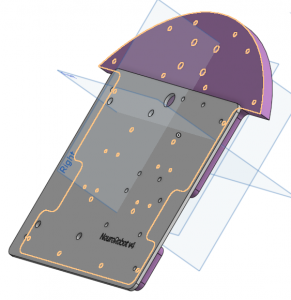
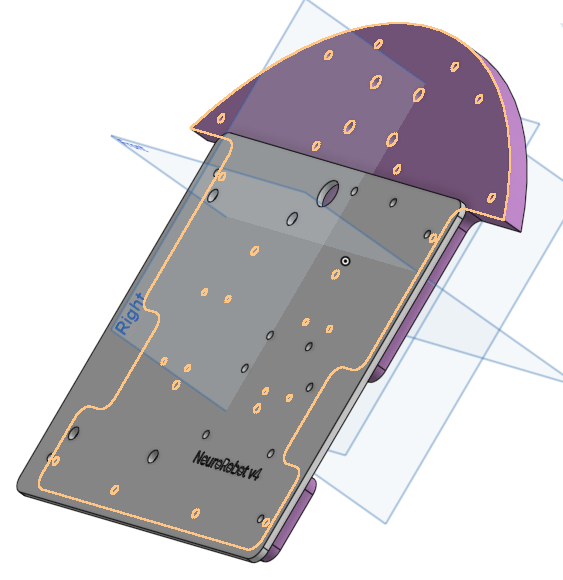
You’ll note that I’ve removed the room for the back sensors. It makes the robot smaller, and moves the wheels further towards the back, so the robot lean distinctly forwards (so it doesn’t move like a chicken). This also removes room for the back sensors… but I’m not using them in the code anyway.
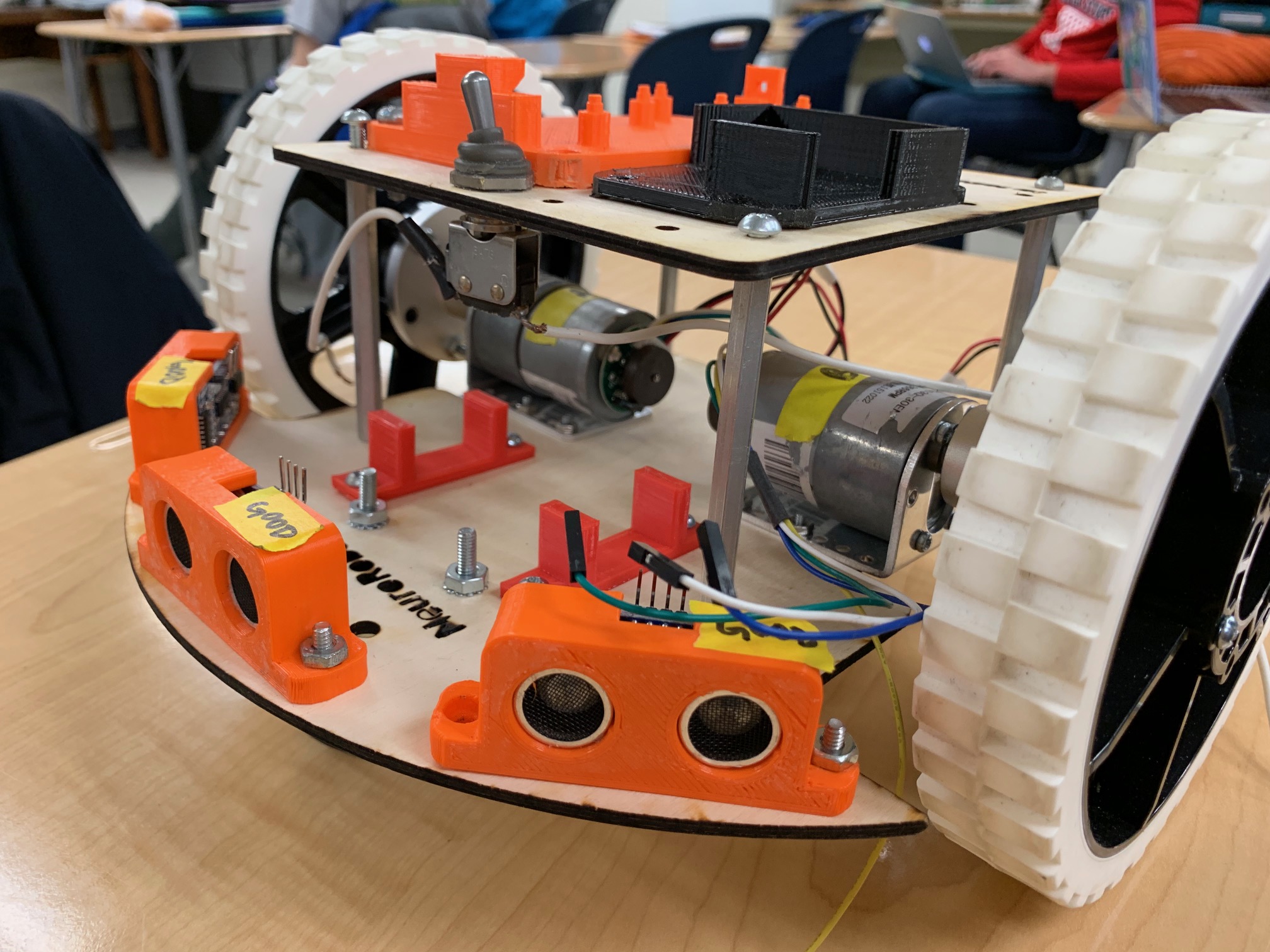
A Few pictures of the build:
Okay I thought it turned out looking SUPER CUTE (and reliable). Here’s a full-blown pic of the front view: