Hello!
The next step in my plan was finding a way to run Roomba in the background while the robot communicated with the neurons, but I’ve come upon a (really big) bump in the road: ‘Roomba’, which I wrote a couple months ago, is no longer working.
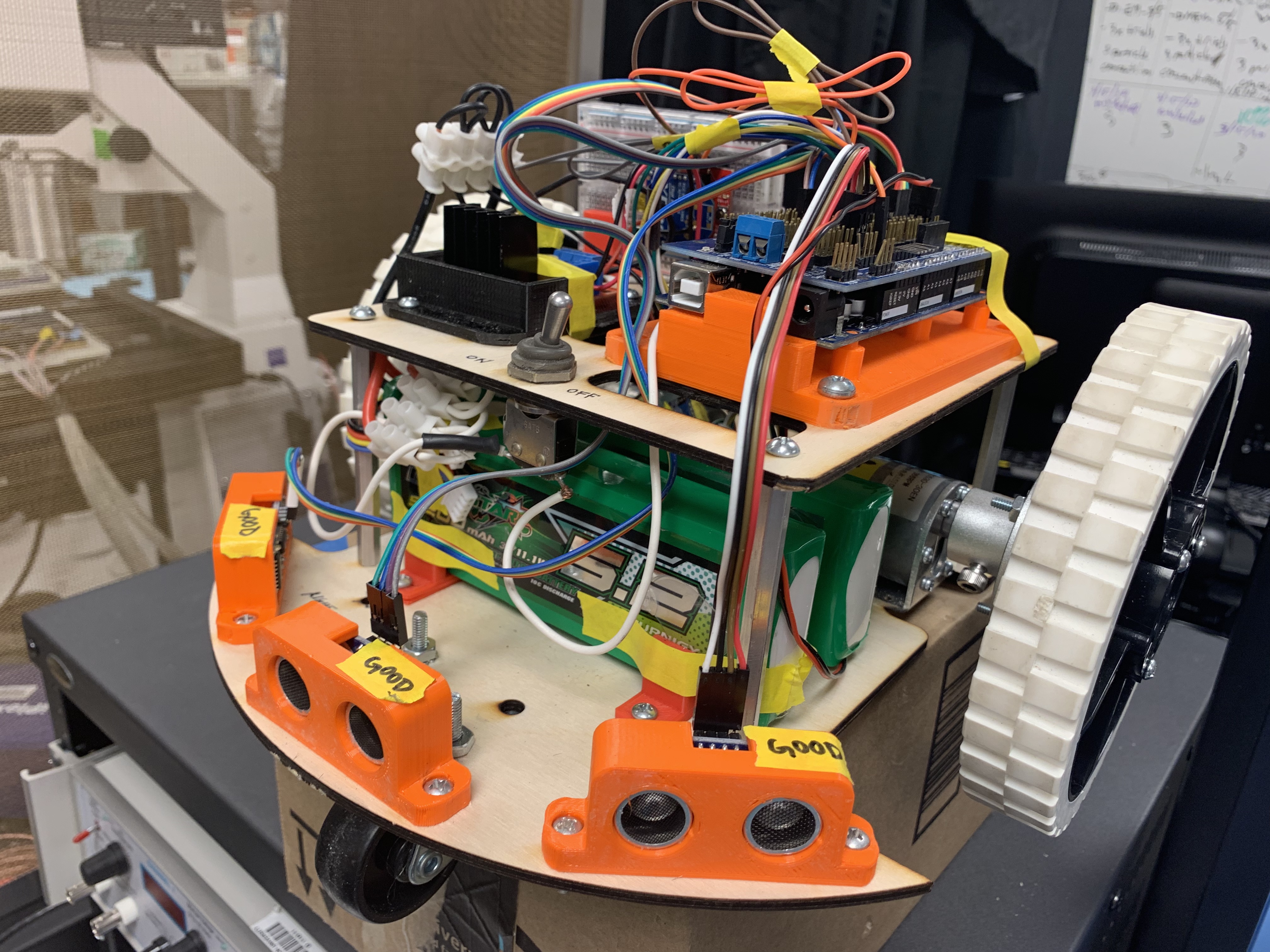
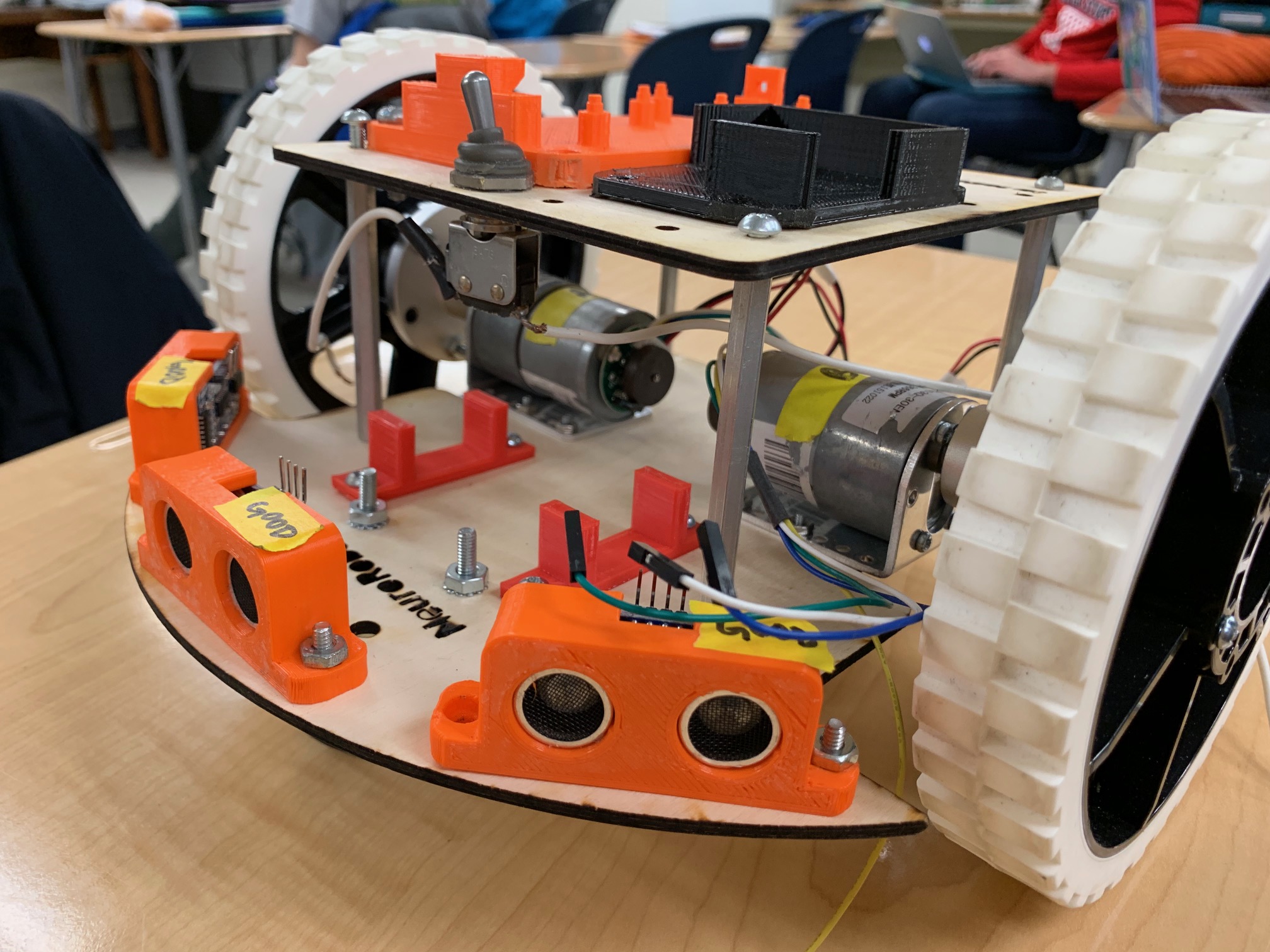
I’m not sure what it is that’s wrong… I thought it was the sensors, so I debugged those. Then I thought it might be the battery, so I soldered up new ones of those. Then I thought maybe it was delay variations caused by the new (fully powered) batteries, so I finished testing the encoders (see below). Now–according to the Serial Monitor–it looks like the Arduino is just getting stuck somewhere in the code, leaving the motors running to just ram into things??
So back to encoders. I think it might help with the ramming-into-things if I rewrite the code so that it moves forward one rotation, then checks the sensors instead of the way it’s working right now…?
Continue reading “Encoders (and a general update)”